
دستي ٽرانسميشن - روبوٽ گيئر باڪس
Contents
ڪا به جديد ڪار انهي جي ابتڙ ۽ هلڪي طريقي سان هلي نه سگهندي جيڪڏهن هن جي ڊيوائس ۾ ڪا ٽرانسميشن ناهي. اڪلهه ، هر قسم جي گئر بڪس موجود آهي ، جيڪي نه فقط ڊرائيور کي اهو اختيار چونڊڻ جي اجازت ڏين ٿا جيڪو هن جي مادي صلاحيتن مطابق هوندو آهي ، پر اهو پڻ ممڪن آهي ته گاڏي کي هلائڻ کان به وڌ کان وڌ آرام حاصل ڪري سگھن.
مختصر قسم جي منتقلي جي مکيه قسمن بابت وضاحت ڪئي وئي آهي الڳ جائزو... هاڻي اچو ته وڌيڪ تفصيل سان ڳالهايو ته روبوٽ گيئر باڪس ڇا هوندو آهي ، هن جي مکيه دستي گيرو باڪس کان ڌار آهي ، ۽ پڻ هن يونٽ جي آپريشن جي اصول تي غور ڪريو.
هڪ روبوٽ گيئر باڪس ڇا آهي
گيئر باڪس جو آپريشن ڪجهه خاصن جي استثنا سان تقريباً هڪ ئي ميڪانياتي اينالاگ جي برابر آهي. روبوٽ جي ڊيوائس ۾ ڪيترائي حصا شامل آهن جيڪي اڳي ئي هر ڪنهن کي واقف آهن دٻي جو ميخانياتي نسخو. روبوٽ ون جي وچ ۾ بنيادي فرق اهو آهي ته ان جو ڪنٽرول مائڪرو پروسيسر جي قسم جو آهي. اهڙي گيري بوڪس ۾ ، گيئر شفٽنگ ، اليڪٽرانڪس جي بنياد تي ، انجڻ جي سينسر ، گئس پيڊل ۽ شيئرز جي ڊيٽا جي بنياد تي ڪئي ويندي آهي.

هڪ روبوٽ باڪس کي خودڪار مشين پڻ چئي سگهجي ٿو ، پر اهو غلط نالو آهي. حقيقت اها آهي ته خودڪار ٽرانسميشن گهڻو ڪري عام طور تي عام تصور طور استعمال ڪيو ويندو آهي. انهي ڪري ، ساڳي ورائيٽر کي گيئر ريشو سوئچ ڪرڻ لاءِ هڪ خودڪار موڊ آهي ، تنهن ڪري ڪجهه لاءِ اهو پڻ هڪ خودڪار آهي. حقيقت ۾ ، روبوٽ مشيني باڪس جي ويجهو ۽ عمل جي اصول ۾ ويجهو آهي.
ٻاهرين طور تي ، خودڪار ٽرانسميشن کان دستياتي ٽرانسميشن کي ڌار ڪرڻ ناممڪن آهي ، ڇاڪاڻ ته انهن وٽ هڪ جهڙو چونڊيندڙ ۽ جسم هوندو. توهان ٽرانسميشن کي صرف چيڪ ڪري سگهو ٿا جڏهن گاڏي هلائڻ دوران هجي. هر قسم جي يونٽ جي پنهنجي ڪم جون خاصيتون آهن.
روبوٽ ٽرانسميشن جو بنيادي مقصد ڊرائيونگ کي ممڪن حد تائين آسان بڻائڻ آهي. ڊرائيور کي پاڻ تي گيئر سوئچ ڪرڻ جي ضرورت نه هوندي آهي - اهو ڪم ڪنٽرول يونٽ پاران ڪيو ويندو آهي. آرام جي اضافي سان گڏ ، پاڻمرادو ٽرانسميشن ٺاهيندڙ به پنهنجون شيون سستو ڪرڻ جي ڪوشش ۾ آهن. ا Todayڪلهه ، روبوٽ مکينيڪل کان پوءِ سڀني کان وڌيڪ بجلي وارو قسم آهي ، پر اهو ويئرنگ يا پاڻمرادو جي طور تي هلائڻ واري سهولت فراهم نٿو ڪري.
هڪ روبوٽ گيئر باڪس جو اصول
روبوٽ ٽرانسميشن يا اڳڀرائي يا نيم پاڻمرادو ايندڙ رفتار تي تبديل ٿي سگهي ٿو. پهرين صورت ۾ ، مائڪروپروسيسر يونٽ سينسر مان سگنل وصول ڪندو آهي ، جنهن جي بنياد تي ڪارخانو ترتيب ڏيڻ وارو الگورتھم حرڪت ڪري ٿو.
گهڻن گيئر باڪس هڪ دستي چونڊيندڙ سان گڏ ليس آهن. انهي صورت ۾ ، رفتار اڃا به پاڻمرادو turnرندي. رڳو ھڪڙي شيء آھي ته ڊرائيور آزاد طور تي مٿي يا گئر تي سوئچ ڪرڻ جي لمحو سگنل ڪري سگھي ٿو. ٽپٽرڪونڪ قسم جا ڪجهه پاڻمرادو منتقلي ساڳيا اصول هوندا آهن.
رفتار وڌائڻ يا گھٽائڻ لاءِ ، ڊرائيور چونڊيندڙ ليور کي + يا طرف -. هن اختيار جي مهرباني سان ، ڪجهه ماڻهو هن ٽرانسميشن کي قطعي يا ترتيب وار چون ٿا.
روبوٽڪس باڪس هيٺ ڏنل اسڪيم مطابق ڪم ڪندو آهي.
- ڊرائيور برڪ کي لاڳو ڪري ٿو ، انجڻ کي هلي ٿو ۽ ڊرائيونگ موڊ چونڊيندڙ ليور کي ڊي جي پوزيشن تي منتقل ڪري ٿو.
- يونٽ مان سگنل باڪس ڪنٽرول يونٽ ڏانهن ويندو آهي ؛
- چونڊيل طريقي جي بنياد تي ، ڪنٽرول يونٽ مناسب الگورتھم کي چالو ڪري ٿو جنهن جي مطابق يونٽ ڪم ڪندو؛
- حرڪت جي عمل ۾ ، سينسر "روبوٽ جي دماغ" ڏانهن گاڏي جي رفتار بابت ، پاور يونٽ جي لوڊ جي باري ۾ ، موجوده گيئر باڪس موڊ بابت سگنل موڪلي ٿو.
- جيترو جلد ئي اشارو فيڪٽريءَ مان انسٽال ٿيل پروگرام سان مطابقت رکي ، ڪنٽرول يونٽ ٻئي گيئر تي تبديل ڪرڻ جو حڪم ڏئي ٿو. اهو يا ته واڌ يا گهٽ رفتار ۾ ٿي سگهي ٿو.
جڏهن ڊرائيور ڪارينڪي ميڪرنڪس سان هلائي رهيو آهي ، ته هو جڏهن گاڏي کي مختلف رفتار سان هلڻ لاءِ لمحو طئي ڪرڻ لاءِ پنهنجي گاڏي محسوس ڪندي. هڪ روبوٽ اينالاگ ۾ ، اهڙو ئي عمل روڪيو ويندو آهي ، فقط ڊرائيور کي اها سوچڻ جي ضرورت نه هوندي ته شفٽ ليور کي جڏهن چاهيندڙ پوزيشن تي ويهاريو وڃي. ان جي بدران ، مائڪرو پروسیسر اهو ڪندو آهي.
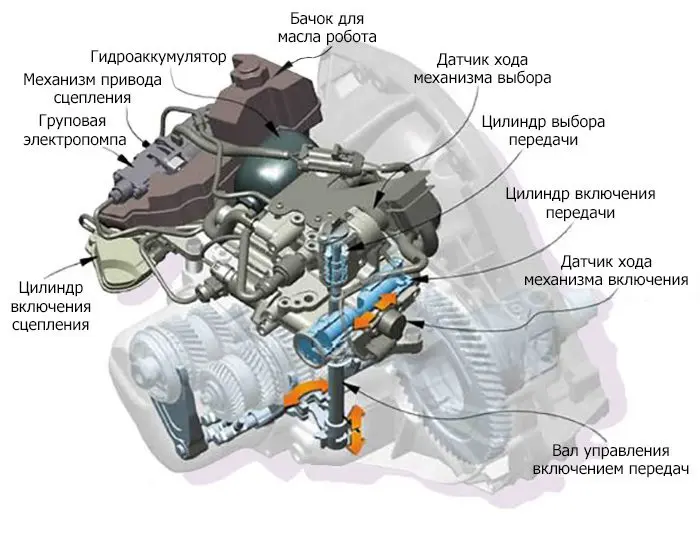
سسٽم سڀني سينسرز کان سڀني معلومات جي نگراني ڪري ٿو ۽ هڪ مخصوص لوڊ لاءِ بهتر گئر چونڊيندو آهي. ته جيئن برقيات گئرز تبديل ڪري سگهن ، ٽرانسميشن ۾ هائيڊروومينڪل ايڪٽيويٽر آهي وڌيڪ عام ورزن ۾ ، هائيڊروومينڪ جي بدران ، هڪ برقي ڊرائيو يا هڪ سرو ڊرائيو انسٽال ٿيل آهي ، جيڪو ڪلچ کي دٻي ۾ ڳن /جي ٿو / ڌار ڪري ٿو (رستي جو ، هي گيٽ باڪس سان ڪجهه مماثلت آهي - ڪلچ هتي واقع ناهي جتي اهو دستي ٽرانسميشن ۾ آهي ، يعني فلائي ويل جي ويجهو ، پر هائوسنگ ۾ ئي ٽرانسميشن).
جڏهن ڪنٽرول يونٽ هڪ سگنل ڏئي ٿو ته اهو مختلف رفتار کي تبديل ڪرڻ جو وقت آهي ، پهرين برقي (يا هائڊرو مکينيڪل) سرو ڊرائيو پهرين کي چالو ڪيو وڃي. اهو ڪلچ فريچڪ سطحن کي ختم ڪري ٿو. ٻيو سرو وري هلڪي theيرڪي ميڪنزم ۾ چاٻي واري جڳھ تي منتقل ڪندو آهي. پوءِ پهريون هڪڙو آهستي آهستي کلچ کي جاري ڪري ٿو. اهو ڊزائن ۾ ڊرائيور جي شرڪت کان سواءِ ڪم ڪرڻ جي اجازت ڏئي ٿو ، تنهن ڪري ، روبوٽڪ ٽرانسميشن سان مشين هڪ ڪلچ پيڊل نه آهي.

چونڊيندڙ تي ڪيترن ئي گيرو بوڪسن کي گيريئر پوزيشن مجبور ڪيو آهي. اهو ناميارو ٽائپرڪونڪ ڊرائيور کي آزاديءَ سان تبديل ٿيڻ جي لمحي کي تيز يا گهٽ رفتار تي وڃڻ جي اجازت ڏئي ٿو.
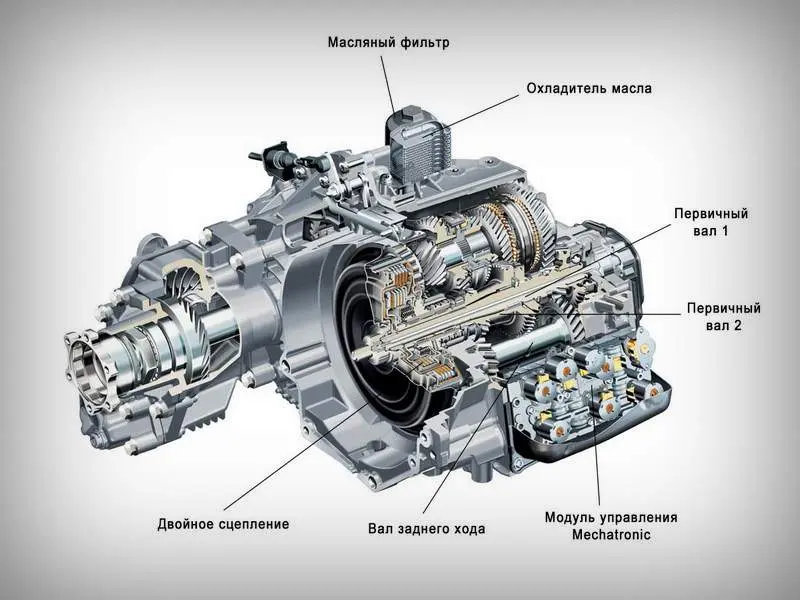
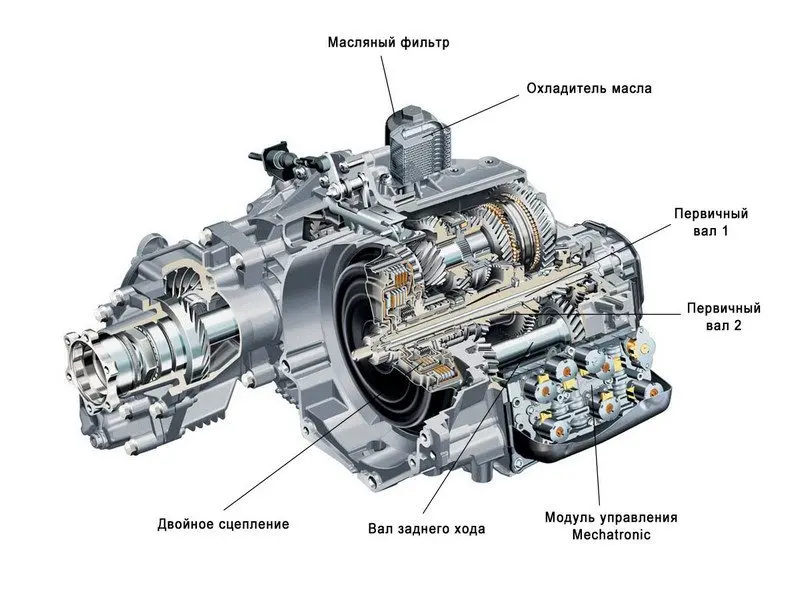
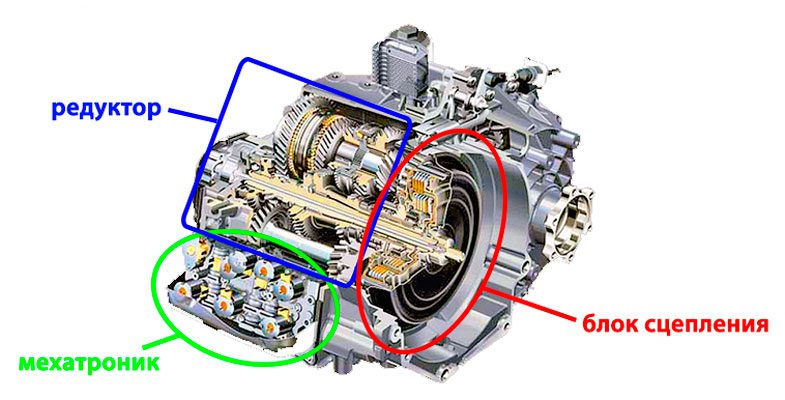
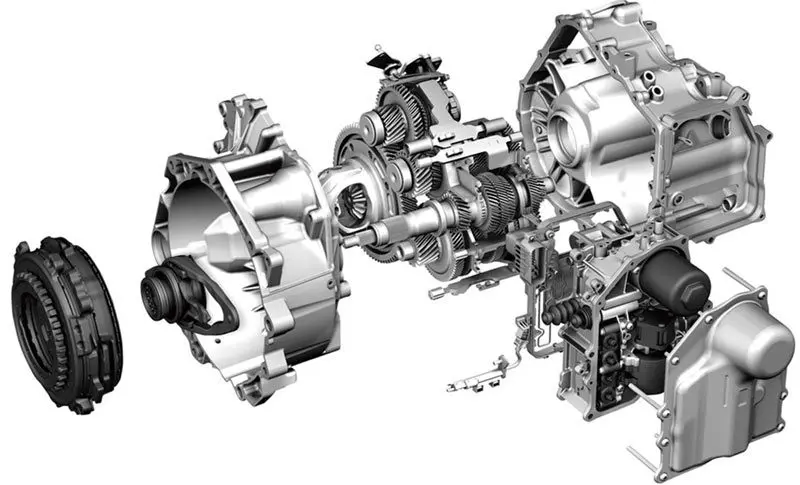
روبوٽ گيئر باڪس ڊيوائس
ا passenger ، مسافر ڪارن لاءِ روبوٽ ٽرانسميشن جا ڪيترائي قسم آهن. اهي ڪجهه ايڪٽيوورٽرز ۾ هڪٻئي کان مختلف ٿي سگهن ٿا ، پر بنيادي حصا ساڳيا رهيا.
هتي نوڊس گيئر باڪس ۾ شامل آهن.
- ڪلچ. ٺاھيندڙ ۽ يونٽ جي تبديلي تي منحصر آھي ، اھو ھڪڙو حصو ٿي سگھي ٿو ھڪڙي رخي مٿاڇري يا ڪيترن ئي ساڳئي ڊسڪ سان. گهڻو ڪري ، اهي عنصر کولينٽ ۾ واقع آهن ، جيڪو يونٽ جي آپريشن کي مستحڪم ڪري ٿو ، انهي کي گرم ڪرڻ کان روڪي ٿو. پريسليبل يا ڊبل آپشن کي وڌيڪ اثرائتو سمجهيو ويندو آهي. هن ترميم ۾ ، جڏهن ته هڪ گيئر مصروف آهي ، ٻيو سيٽ ايندڙ رفتار کي مٽائڻ جي تياري ڪري رهيو آهي.
- مکيه حصو هڪ روايتي مشيني د boxو آهي. هر manufacturerاهيندڙ مختلف ملڪيت جي ڊيزائن کي استعمال ڪري ٿو. مثال طور ، مرسڊيز برانڊ (Speedshift) مان ھڪڙو روبوٽ اندروني طور تي 7G-Tronic خودڪار ٽرانسميشن آھي. يونٽن جي وچ ۾ ر differenceو فرق اهو آهي ته هڪ ٽوڪ ڪنورٽر جي بدران ، هڪ ڪلچ ڪيترن ئي رگڙ ڊسڪ سان استعمال ٿئي ٿو. BMW وٽ ھڪڙو سا approachيو طريقو آھي. ان جو SMG gearbox basedھ اسپيڊ مينوئل گيرو باڪس تي ل آھي.
- ڪلچ ۽ ٽرانسميشن ڊرائيو. ٻه اختيارَ آهن ـــ برقي ڊرائيو يا هائيڊروومينڪل اينالاگ سان. پهرين صورت ۾ ، ڪلچ هڪ برقي موٽر کي دٻايو ويو آهي ، ۽ ٻئي ۾ - اي ايم والوز سان هائڊروڪڪ سلنرز کان. بجلي واري حرڪت هائڊرووليڪز کان وڌيڪ ڪم ڪندي آهي ، پر انهي ۾ لائن ۾ مسلسل دٻاءُ جي بحالي جي ضرورت نه هوندي آهي ، جتان برقي هائيڊروڪ قسم هلائي ٿي. هڪ هائيڊروٽو روبوٽ وڌيڪ تيز رفتار سان ٻئي اسٽيج تي هلندي آهي (0,05 سيڪنڊ بمقابلہ 0,5 سيڪنڊ هڪ برقي اينالاگ). بجلي واري ڪارن تي هڪ بجلي وارو گئر بڪس خاص طور تي نصب ٿيل آهي ، ۽ هڪ هائڊرو مکينڪل گيئر بڪس پريميئم اسپورٽس ڪارن تي انسٽال ٿيل آهي ، جئين ته ڊرائيو شافٽ تي بجلي جي فراهمي ۾ رڪاوٽ وجهڻ کانسواءِ گيئر شفٽ انهن ۾ انتهائي اهم آهي.

- سينسر. روبوٽ ۾ اهڙا ڪيترائي حصا هوندا آهن. اهي ٽرانسميشن جي ڪيترن ئي پيٽرولن جي نگراني ڪن ٿا ، مثال طور ، فورڪ جي پوزيشن ، ان پٽ ۽ آئوٽ شافٽس جا انقلاب ، جنهن ۾ چونڊيندڙ سوئچ بند ٿيل آهي ، ڪوئلن جو گرمي پد وغيره. هي سڀ معلومات ميڪانيزم ڪنٽرول ڊوائيس کي فيڊ ڪيو ويندو آهي.
- اي سي يو هڪ مائڪروپروسيسر يونٽ آهي ، جنهن ۾ مختلف الگورٿمس سينسرز کان ايندڙ مختلف اشارن سان پروگرام ٿيل آهن. هي يونٽ مکيه ڪنٽرول يونٽ سان ڳن isيل آهي (اتان کان انجن آپريشن آپريشن جي ڊيٽا اچي ٿي) ، انهي سان گڏ اليڪٽرڪ وائل لاڪنگ سسٽمز (ABS يا اي پي ايس).
- ايڪٽيوورٽر - هائڊروڪڪ سلنڈر يا برقي موٽر ، باڪس جي ترميم تي منحصر آهي.
آر پي پي پي جي ڪم جي وضاحت
گاڏي کي آساني سان شروع ڪرڻ لاءِ ڊرائيور کي ڪلچ پيڊل صحيح طريقي سان استعمال ڪرڻ گهرجي. بعد ۾ هو پهريون يا ريورس گيئر شامل ڪيو ، هن کي پيالو ڪ smoothي ڇڏڻ جي ضرورت آهي. هڪ دفعو ڊرائيور جي ڊسڪ جي مشغولگيءَ جو احساس ٿيڻ کپي ، جيئن هو پيڊل ڇڏيندو آهي ، هو ڪار کي رکڻ کان رکڻ لاءِ انجڻ ۾ آر پي ايم شامل ڪري سگهي ٿو. اهو طريقي سان ڪم ڪندڙ آهي.
روبوٽ جي هم منصب ۾ هڪجهڙائي وارو عمل ٿيندو آهي. صرف انهي صورت ۾ ڊرائيور کان هڪ وڏي مهارت جي ضرورت نه هوندي آهي. هن کي صرف باڪس سوئچ کي مناسب پوزيشن ڏانهن منتقل ڪرڻ جي ضرورت آهي. گاڏي ڪنٽرول يونٽ جي سيٽنگن مطابق هلڻ شروع ٿي ويندي.

ساده واحد ڪلچ ترميمي طريقي سان کلاسي ميڪانيات وانگر ڪم ڪري ٿي. بهرحال ، ساڳي وقت ، هڪ ئي مسئلو آهي - اليڪٽرانڪ ڪلچ جي موٽ تي رڪارڊ نٿي ڪري. جيڪڏهن ڪو ماڻهو اهو طئي ڪري سگھندو ته ڪنهن خاص صورت ۾ پيڊل جاري ڪرڻ لازمي آهي ته پوءِ پاڻمرادو وڌيڪ سختي سان ڪم ڪري ٿو ، تنهنڪري ڪار جي حرڪت کي تنگ ڪن جرڪن سان گڏ رکڻ گهرجي.
اهو خاص طور تي ايڪٽيوورٽرز جي برقي ڊرائيو سان ترميمن ۾ محسوس ڪيو ويو آهي - جڏهن گيئر شفٽ ٿي رهي آهي ، ڪلچ هڪ کليل حالت ۾ هوندي. ان جو مطلب ٿيندو ٽوڪ جي وهڪري ۾ خرابي ، جنهن سبب ڪار سُست ٿيڻ شروع ٿي وڃي ٿي. چورن جي گردش جي رفتار پهريان کان ئي مشغول ڪاريئر سان گهٽ آهي ، هڪ نن jerڙو جهٽڪو واقع ٿئي ٿو.
هن مسئلي جو هڪ جديد حل ڊبل ڪلچ واري ترميم جي ترقي هو. اهڙي ٽرانسميشن جو هڪ نمايان نمائندو وولڪس ويگن ڊي ايس جي آهي. اچو ته ان جي خاصيتن جو ھڪ ويجھو جائزو وٺون.
ڊي ايس جي روبوٽ گيئر باڪس جون خاصيتون
مخفف سڌي شفٽ گيئر باڪس جو مخفف آهي. اصل ۾ ، هي ٻه رهائشي خانن ۾ هڪ ئي مکين سان لڳل آهن ، پر هڪ ڪنيڪشن پوائنٽ سان مشين جي چيس ڏانهن. هر ميڪانيزم جي پنهنجي ڪلچ آهي.
هن ترميم جي بنيادي خاصيت پريسلڪ موڊ آهي. اهو آهي ، جڏهن پهريون شافٽ گيئر سان هلندڙ آهي ، برقيات اڳ ۾ ئي متعلقہ گيئرز کي ڳن connي ٿو (جڏهن گئر کي وڌائڻ لاءِ تيز ٿي ، جڏهن ڏورائي ويندڙ - ٻئي طرف). بنيادي محرڪ صرف هڪ ڪلچ کي ختم ڪرڻ ۽ ٻئي کي ڳن needsڻ جي ضرورت آهي. جيترو جلد ئي سگنل يونٽ کان ٻئي اسٽيج تي موٽڻ جو سگنل ملي وڃي ، ڪم ڪندڙ ڪلچ کوليو وڃي ٿو ، ۽ ٻيو اڳي ئي گيئر سان اڳي ئي ٺهيل هڪدم ڳن isيل آهي.
اهو ڊزائن توهان کي تيز سفرن کان بغير سواري جي اجازت ڏئي ٿو جڏهن تيز ٿيڻ. هڪ ترقياتي تبديلي جي پهرين ترقي گذريل صدي جي 80s ۾ ظاهر ٿيو. صحيح ، پوءِ ڊبل ڪلچ سان روبوٽ لڳل هئا جيڪي ريلي ۽ ريسنگ ڪارن تي آهن جن ۾ گيئر شفٽ جي رفتار ۽ درستگي وڏي اهميت رکي ٿي.
جيڪڏهن اسان ڊي ايس جي باڪس کي ڪلاسيڪل خودڪار سان تشبيهه ڏيون ٿا ، ان بعد پهرين آپشن ۾ وڌيڪ فائدا آهن. پهرين ، بنيادي عنصرن جي وڌيڪ واقف structureانچي جي ڪري (ٺاهيندڙ بنيادي طور تي ڪو تيار ٿيل مکينيڪل اينالاگون کڻي سگهن ٿا) ، اهڙي باڪس وڪرو تي سستي هوندي. ساڳيو عنصر يونٽ جي سار سنڀال تي اثرانداز ٿيو- مڪينيڪل وڌيڪ قابل اعتماد ۽ مرمت ۾ آسان آهن.
هن ٺاھيندڙ کي ان قابل ڪيو ته ھو پنھنجي شين جي بجيٽ جي منڊلن تي ھڪ جديد ٽرانسميشن نصب ڪري. ٻيو ته ، اهڙي گيئر باڪس سان ڪيترن ئي مالڪن جي گاڏين هڪجهڙي نموني جي ڀيٽ ۾ ڪار جي ڪارڪردگي ۾ واڌ نوٽ ڪري ٿي ، پر هڪ مختلف گيئر باڪس سان.
ويگ جي انچارج جا انجنيئر ڊي ايس جي ٽرانسميشن جا ٻه قسم تيار ڪيا آهن. انهن مان هڪ کي 6 جو ليبل ڏنو ويو آهي ، ۽ ٻيو 7 آهي ، جيڪو هن دٻي ۾ قدمن جي تعداد جي برابر آهي. پڻ ، ڇهه رفتار خودڪار گيلا ڪلچ استعمال ڪندو آهي ، ۽ هڪ سات اسپيڊ اينالاگ خشڪ ڪلچ استعمال ڪندو آهي. وڌيڪ تفصيل سان ڊي ايس جي باڪس جي نفعي ۽ نقصان بابت الڳ مضمون.
فائدا ۽ نقصانات
منتقلي جي تجويز ڪيل قسم ٻنهي مثبت ۽ منفي طرفن سان آهي. باڪس جا فائدا شامل آهن:
- اهڙي ٽرانسميشن تقريباً ڪنهن طاقت جي بجلي جي يونٽ سان ملي ڪري سگهجي ٿي.
- ويريٽر ۽ هڪ خودڪار مشين جي ڀيٽ ۾ ، روبوٽڪ نسخو سستو آهي ، حالانڪه هي هڪ نهايت جديد ترقي آهي ؛
- روبوٽ ٻين خودڪار منتقلي کان وڌيڪ معتبر آهن.
- ميڪيڪينس سان اندروني مشابهت جي ڪري ، هڪ ماهر ڳولڻ آسان آهي ، جيڪو يونٽ جي مرمت کي انجام ڏيندو.
- وڌيڪ موثر گيئر شفٽنگ ايندھن جي استعمال ۾ نازڪ اضافو کانسواءِ انجڻ جي طاقت جي استعمال جي اجازت ڏئي ٿو.
- ڪارڪردگي بهتر ڪرڻ سان ، مشين ماحول ۾ گهٽ نقصان ڏيندڙ مواد خارج ڪري ٿي.
ٻين خودڪار منتقلي تي واضح فائدن جي باوجود ، روبوٽ کي ڪيترائي اهم نقصان آهن:
- جيڪڏهن ڪار هڪ ڊسڪ روبوٽ سان ليس آهي ، اهڙي گاڏي جو سفر آرامده نه ٿو چئي سگهجي. جڏهن گيئر بدلائيندي ، اتي ترڪي جا jerره هوندا ، ifڻ ته ڊرائيور اوچتو ڪلچ پيڊل کي ميڪينڪ تي thrٽي ٿي.
- گهڻو ڪري ، ڪلچ (گهٽ هموار مشغول) ۽ ايڪٽينٽس يونٽ ۾ ناڪامي ٿي. اهو ٽرانسميشن جي مرمت کي پيچيده ڪري ٿو ، ڇاڪاڻ ته انهن وٽ هڪ نن workingڙو ڪم ڪندڙ وسيلا آهي (اٽڪل 100 هزار ڪلوميٽر). عمدي طور تي سرو مرمت ٿيندي آهي ۽ هڪ نئون ميڪانيزم قيمتي آهي.
- جيتري قدر ڪلچ لاءِ آهي ، ڊسڪ جو وسيلو پڻ تمام نن --ڙو آهي - اٽڪل 60 هزار. ان کان علاوه ، تقريبن اڌ وسائل تي دارومدار جي ٽڪراءَ واري سطح جي حصي هيٺ دٻي جو ”لاڳاپو“ کڻڻ لازمي آهي.
- جيڪڏهن اسان ڊي ايس جي موزون ترتيب ڏيڻ جي ڳالهه ڪيون ٿا ، ته اهو سوئچنگ جي رفتار گهٽ وقت جي ڪري وڌيڪ معتبر ثابت ٿيو (انهي جي مهرباني ، ڪار ايترو سست نه ٿيو). ان جي باوجود ، ورهاست اڃا تائين انهن ۾ مبتلا آهي.
درج ڪيل فڪرن کي ذهن ۾ رکندي ، اسان اهو نتيجو ڪري سگهون ٿا ته جئين ڀٽائي ۽ ڪم ڪرڻ واري زندگي جو تعلق آهي ، ميڪينڪ اڃا تائين برابر نه آهن. جيڪڏهن زور وڌ کان وڌ آرام تي ڏنو وڃي ، اهو بهتر آهي ته ويريٽر چونڊجي (ان جي فيچر ڇا آهي ، پڙهو هتي). اهو ذهن ۾ رکڻ گهرجي ته ان ٽرانسميشن ٻارڻ کي بچائڻ جو موقعو فراهم نه ڪندي.
آخر ۾ ، اسان منتقلي جي مکيه قسمن جو مختصر وڊيو مقابلو پيش ڪندا آهيون - انهن جو فائدو ۽ نقصان:

سوال ۽ جواب:
هڪ روبوٽ ۽ هڪ automaton جي وچ ۾ ا فرق آهي؟ ٽوڪ ڪنورٽر جي ڪري خودڪار ٽرانسميشن ڪم ڪري ٿي (ڪلچ ذريعي فلائي ويل سان ڪو به سخت جوڙو نه آهي)، ۽ روبوٽ ميڪيڪل جو هڪ اينالاگ آهي، صرف رفتار خودڪار طريقي سان تبديل ٿي ويندي آهي.
روبوٽ باڪس تي گيئر ڪيئن شفٽ ڪجي؟ هڪ روبوٽ هلائڻ جو اصول هڪ خودڪار مشين کي هلائڻ لاء هڪجهڙائي آهي: گهربل موڊ چونڊيندڙ تي چونڊيو ويو آهي، ۽ انجڻ جي رفتار کي گيس پيڊل طرفان منظم ڪيو ويندو آهي. رفتار خودڪار طريقي سان تبديل ٿي ويندي.
روبوٽ سان گڏ ڪار ۾ ڪيترا پيڊل آھن؟ جيتوڻيڪ روبوٽ ساخت جي لحاظ کان ميڪنڪس سان ملندڙ جلندڙ آهي، ڪلچ خود بخود فلائي ويل کان ڌار ٿي وڃي ٿو، تنهنڪري هڪ روبوٽ ٽرانسميشن سان ڪار ۾ ٻه پيادل (گئس ۽ بريڪ) هوندا آهن.
هڪ روبوٽ باڪس سان ڪار کي ڪيئن صحيح طور تي پارڪ ڪجي؟ يورپي ماڊل کي A موڊ يا ريورس گيئر ۾ پارڪ ڪيو وڃي. جيڪڏهن ڪار آمريڪي آهي، پوء چونڊيندڙ وٽ آر موڊ آهي.
هڪ رايو
دائود
هيلو، مون کي مدد جي ضرورت آهي، 203 ڪوپس ايمرجنسي موڊ ۾ هليا ويا، مان ڇا ڪري سگهان ٿو؟